Currently there are no notifications.
Energy in Mechanics - Kinetic, Potential and Thermal Energy
Energy is the central quantity of mechanical processes. It allows movement, acceleration, and the overcoming of forces. The article shows the differences in potential and kinetic energy and explains how to calculate mechanical power for different use cases. A particular focus is on energy conversion and typical loss mechanisms due to friction, damping, and deformation. In addition, it is shown how energy density and power density influence the efficiency of technical systems.
Energy in Mechanics
Energy, as a physical quantity, is the ability to perform work, emit heat, or emit light. Energy in itself is neither tangible nor visible. Energy is truly recognizable only by its effect. In the case of a rolling ball, you can see the movement, but you do not see the potential and kinetic energy stored in the ball. The stored energy may exist in many different forms. Electrical energy, kinetic energy, potential energy, and thermal energy are just a few.
Mechanical energy is divided into elevation or position energy (potential energy) and motion energy (kinetic energy). Any change in the state, position, or movement of a body also means a change in the energy (E) stored in the body. In a closed system, no energy can simply disappear. However, energy can be supplied or removed from the outside of the system. When energy is supplied or removed from the outside of the closed system, the change in the amount of energy is called work (W).
W = E_{before}-E_{after}
In all areas of physics, energy serves as the basis of movement. This assumes that energy is never lost. However, it can change its form, for example, kinetic energy can become heat.
The golden rule of mechanics also applies here: “What you save in force, you have to make up for in distance.” This describes the energy conversion when using machines, according to which the total energy is conserved. Such conversions are central for mechanical applications such as levers, pulleys, or inclined planes. The law of conservation of energy applies in a closed system without additional exchange of energy and without taking friction into account.
This is expressed in the law of conservation of energy with the following formula:
E_{sto} = E_{pot} + E_{kin} = constant
But what are kinetic and potential energy?
Potential energy, also known as positional energy, is the energy a body has due to its position in a force field or its configuration.
Potential energy is calculated using the following formula:
E _{pot} = m \times g \times h
• m = mass
• g = gravitational acceleration of 9.81 m/s²
• h = height difference from the base reference point
Kinetic energy is a form of energy that exists only in moving objects. It is therefore also called motion energy. Kinetic energy is also dependent on the mass of the body in motion, as well as on its speed v. The energy is equal to the work required to bring the body from rest into motion.
Kinetic energy is calculated using the following formula:
E _{kin} = \frac{1}{2} \times m \times v^{2}
The interaction of the forms of energy can be clearly illustrated using the example of a spring press. When tensioning the spring, mechanical work is performed, which is then stored in the spring as potential energy (in this case tension energy). When the spring is released, the potential tension energy is converted into kinetic energy. For additional practical cases, see our article Make your choice between springs and gas springs supplement and link
Another form of energy is thermal energy. It usually results from friction or internal movements of the particles of a substance, so it describes the kinetic energy of these particles. The higher the kinetic energy of a particle, the warmer the substance and the higher the thermal energy.
Work and Energy
Let’s take a closer look at the link between work and energy. As mentioned earlier, work in mechanics describes the transfer of energy through a force acting along a path. When force is transferred from one body to the next, work is done. Work can be calculated from the effective force and the distance traveled. For nonlinear paths, the line integral is used. There are different forms of mechanical work that, due to their nature, occur as different energies:
- Lifting changes the position of a body and creates potential energy.
- Accelerating work moves a body and creates kinetic energy.
- Tension work generates tension energy.
- Frictional work generates thermal energy.
Only the first three forms of energy can be exploited. In the case of friction, an energy degradation takes place, see more in the following section.


")
Energy Conversion
In an ideal system, energy is converted reversibly. This means that the potential and kinetic energy are converted into one another without the occurrence of friction. An example would be a pendulum in a vacuum that moves without friction. At the highest point, the pendulum has the maximum potential energy and at the center of its oscillation it has the maximum kinetic energy. This process is reversible and the amount of energy in the system remains constant.
In reality, however, the body is slowed down by the influence of other forces and some of the kinetic energy is converted into thermal energy. This also means that this degradation of energy is irreversible and the amount of usable energy of a real system is steadily reduced until it comes to a standstill. Without further effort, the energy lost in this way cannot be completely converted back. The main causes of these losses are friction, damping, and plastic deformation.
Friction occurs wherever two solid surfaces move relative to each other, e.g. in sliding or rolling bearings, guides or threaded connections. In doing so, some of the mechanical energy is converted into heat by adhesive and sliding friction forces, resulting in irreversible energy loss. While it is technically possible to minimize friction losses (e.g. by lubrication or material selection), it is never possible to completely avoid them.

Damping refers to the targeted or unwanted reduction of vibrations in a system, usually by converting kinetic energy into internal friction and heat. Even if damping is desired (e.g. for vibration damping), some of the kinetic energy is lost and is no longer available for mechanical work.

In plastic deformations (e.g. punching operations or bending processes), some of the energy is used to permanently reshape the material. This energy cannot be converted back into kinetic or potential energy, but remains bound as a structural change in the material. Even with elastic deformations (e.g. in springs), a small portion of the energy is lost as heat due to internal material stresses and hysteresis.
Energy density and power
While energy is the central element for physical processes, how quickly it is available is also critical. The so-called Power describes how much energy is converted per time period. The power output can be calculated as follows:
P = \frac{E}{t}
• P = power in watts
• E = energy in joules
• t = time in seconds
Power can be changed by providing more energy or reducing the time required. The latter describes the mechanical power: The faster the work is done, the higher the mechanical power. Different types of work can thus be compared with each other.
Calculating mechanical power
Mechanical power can be calculated in different ways. For rotating components, the mechanical power can be calculated for torque, for example. This power is also called shaft power (what matters for a coupling is explained in our tech blog Shaft couplings and joints ).
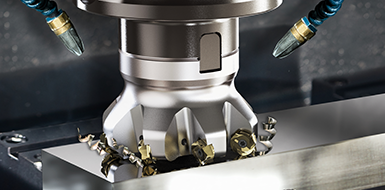
In the practical application of a milling machine, the power required for a selected feed rate is calculated from the torque required to remove the material and the speed of the shaft. The following formula is used in the calculation:
P = 2\pi \times M \times n
• P = power in W
• M = torque in Nm
• π = circle constant pi
• n = rotational speed in rev/s
A special case of mechanical power is the lifting power, i.e. the power provided when raising a mass against gravity. The calculation uses the lifting work resulting from the multiplication of mass, gravitational acceleration and lifting height. Dividing this work by the time required gives the lifting power.
P = \frac{F \times s}{t}
• P = power in W
• F = force in N
• s = distance in m
• t = time in s
Another special case of mechanical power is the calculation of acceleration power. Translation is the linear movement of a body that is always initiated by a previous acceleration. The mechanical power of such motion can be calculated via force and speed. It does not matter whether you are talking about acceleration power or translational power for the calculation. A typical example is moving a mass on rollers where a force acts over a distance, thereby generating a velocity. The acceleration power can be calculated as follows:
P = F \times v
• P = power in W
• F = force in N
• v = speed in m/s